写这个文章的原因是为了记录一下这个困扰我很久的单词, 到底是啥意思。所以,这个文章其实就是一个单词解释。网上找这个单词,也找不到这个单词的具体名字是啥。
首先上维基百科。
In time series analysis(or forecasting) — as conducted in statistics, signal processing, and many other fields — the innovation is the difference between the observed value of a variable at time t and the optimal forecast of that value based on information available prior to time t. If the forecasting method is working correctly, successive innovations are uncorrelated with each other, i.e., constitute a white noise time series. Thus it can be said that the innovation time series is obtained from the measurement time series by a process of 'whitening', or removing the predictable component. The use of the term innovation in the sense described here is due to Hendrik Bode and Claude Shannon(1950)[1]in their discussion of the Wiener filter problem, although the notion was already implicit in the work of Kolmogorov.[2]
维基百科上的解释显示,innovation 这个词是根据已有信息预测出来的最佳预测值和测量值之间的误差。但是维基百科解释说innovation 这个词是来自下面这个论文1。但是把,下面这个论文中,我通过,ctrl+F查找,并没有找到innovation 这个单词。

所以我继续找了找。 以Kalman filter innovation covariance为关键词进行搜索,出现了很多用了innovation 这个词的论文。
其中参考文献[1]最为简单明了的解释了innovation 相关的东西。
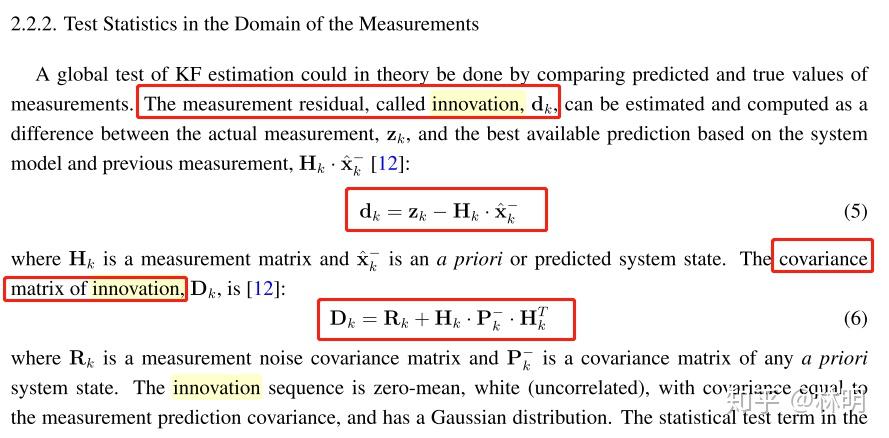
也就是说,innovation=实际传感器测量值 - 传感器预测值。也称为测量残差。
而innovation covariance 就相对应就是是 innovation这个值的协方差。 fig.2的公式(6)其实就是卡尔曼增益的后面那部分。
那么innovation是什么搞明白了。那么翻译过来是啥呢?
innovation vector叫新息向量。 那么innovation covariance 应该是叫新息协方差。其实这个命名“新息”应该是指新的信息的意思,而卡尔曼滤波器里面的新息,我认为是测量值的意思。那么可以联想到卡尔曼增益。他们采用了“增“,”益”和“新”这类词语。在我理解,其实都是关于新的信息(测量值)。Kalman gain 考虑的是权衡预测和测量哪个更准确一些,也就是评估要利用多少测量值的信息。而innovation考虑的是实际测量值和估摸着计算的预测值到底差多少。Kalman gain是利用了innovation来权衡到底要利用多少新的信息(测量值)。
简单记录一下innovation 相关的东西。因为之前看论文,总出现这个词, 今天算是搞明白了~ 这个词把, 我们一般直接调用KF的时候,不需要进行深度处理,因为卡尔曼增益公式已经给出了,跟着做就行。但是,如果想修改公式,构建新的滤波器的时候,就得一步一步都搞明白。希望对大家也有帮助。
20200504 研究室
[1]https://www.mdpi.com/1424-8220/14/10/18053/pdf